Workshop on ROS 2 LIDAR clustering¶
This short workshop will guide you through filtering LIDAR data into objects. Objects could be pedestrians, cars, buildings, and so on. This workshop is ROS 2 compatible.
Requirements (high-level overview)¶
- ROS 2 Humble: 🟠 see previous workshops or docs.ros.org/en/humble/Installation.html
- A log file with raw LIDAR data (MCAP format) ✅
- The
patchworkpppackage to filter out the ground plane ✅ - The
lidar_clusterpackage to perform the clustering ✅
Video overview¶
The following screen recording demonstrates the steps involved:
Step 1. - Download the raw data¶
In order to cluster LIDAR data, first you need - no surprise - LIDAR data. Use any of the following 3 options.
Option A. - Download our MCAP from the link below¶
In our examples the .mcap file is going to be saved in /mnt/c/bag/. If you want to use another directory, please change it accordingly.
Option B. - Download our MCAP through your terminal¶
Don't forget to change directory first.
In our case `/mnt/c/bag/` is used as a final destination:cd /mnt/c/bag/
wget https://laesze-my.sharepoint.com/:u:/g/personal/herno_o365_sze_hu/Eclwzn42FS9GunGay5LPq-EBA6U1dZseBFNDrr6P0MwB2w?download=1 -O lexus3-2024-04-05-gyor.mcap
Option C. - Use your own MCAP¶
You can use your own MCAP, but in that case, you may need to change following:
- The LIDAR topic
- In our examples it's
/lexus3/os_center/points
- In our examples it's
- LIDAR frame
- In our examples it's
lexus3/os_center_a_laser_data_frame
- In our examples it's
Never forget to update these in later steps if you use your own MCAP.
Check your raw data¶
Play your bag using the following command (or however you wish):
ros2 bag play /mnt/c/bag/lexus3-2024-04-05-gyor.mcap -l
Info
The -l option in the play command loops the mcap file.
Success
If everything works as expected you should see a bunch of topics in another terminal
Topics
In another terminal issue the command:
ros2 topic list
/clock
/events/read_split
/lexus3/gps/duro/current_pose
/lexus3/gps/duro/imu
/lexus3/gps/duro/mag
/lexus3/gps/duro/navsatfix
/lexus3/gps/duro/status_flag
/lexus3/gps/duro/status_string
/lexus3/gps/duro/time_diff
/lexus3/gps/duro/time_ref
/lexus3/os_center/points
/lexus3/os_left/points
/lexus3/os_right/points
/lexus3/zed2i/zed_node/left/image_rect_color/compressed
/parameter_events
/rosout
/tf
/tf_static
Also there must be at least one sensor_msgs/msg/PointCloud2, check with:
ros2 topic type /lexus3/os_center/points
sensor_msgs/msg/PointCloud2
Step 2. - Install ROS 2 packages¶
Info
If you don't have the ~/ros2_ws/ directory already, create it with the following command:
mkdir -p ~/ros2_ws/src
Clone patchworkpp package¶
patchwork-plusplus-ros is ROS 2 package of Patchwork++ (@ IROS'22), which provides fast and robust LIDAR ground segmentation. We recommend the JKK research fork which contains some improvements, alternatively you can use the original KAIST version.
cd ~/ros2_ws/src
git clone https://github.com/jkk-research/patchwork-plusplus-ros
git clone https://github.com/url-kaist/patchwork-plusplus-ros -b ROS2
Clone lidar_cluster package¶
cd ~/ros2_ws/src
git clone https://github.com/jkk-research/lidar_cluster_ros2
Build the packages¶
cd ~/ros2_ws
colcon build --packages-select patchworkpp lidar_cluster --symlink-install
Step 3. - Run¶
What to expect¶
graph TD;
p1[ /lexus3/os_center/points<br/>sensor_msgs::PointCloud2]:::white --> patchwork([ /patchwork_node]):::light
patchwork --> p
p[ /nonground<br/>sensor_msgs::PointCloud2]:::white --> cluster([ /cluster_node]):::light
cluster --> f1[ /clustered_points<br/>sensor_msgs::PointCloud2]:::white
cluster --> f2[ /clustered_marker<br/>visualization_msgs::MarkerArray]:::white
classDef light fill:#34aec5,stroke:#152742,stroke-width:2px,color:#152742
classDef dark fill:#152742,stroke:#34aec5,stroke-width:2px,color:#34aec5
classDef white fill:#ffffff,stroke:#152742,stroke-width:2px,color:#15274
classDef dash fill:#ffffff,stroke:#152742,stroke-width:2px,color:#15274, stroke-dasharray: 5 5
classDef red fill:#ef4638,stroke:#152742,stroke-width:2px,color:#fffDon't forget to source before ROS commands.
source ~/ros2_ws/install/setup.bash
ros2 bag play /mnt/c/bag/lexus3-2024-04-05-gyor.mcap -l
ros2 launch patchworkpp demo.launch.py cloud_topic:=/lexus3/os_center/points cloud_frame:=lexus3/os_center_a_laser_data_frame
ros2 launch lidar_cluster dbscan_spatial.launch.py
ros2 launch lidar_cluster euclidean_spatial.launch.py
ros2 launch lidar_cluster euclidean_grid.launch.py
ros2 launch lidar_cluster rviz02.launch.py
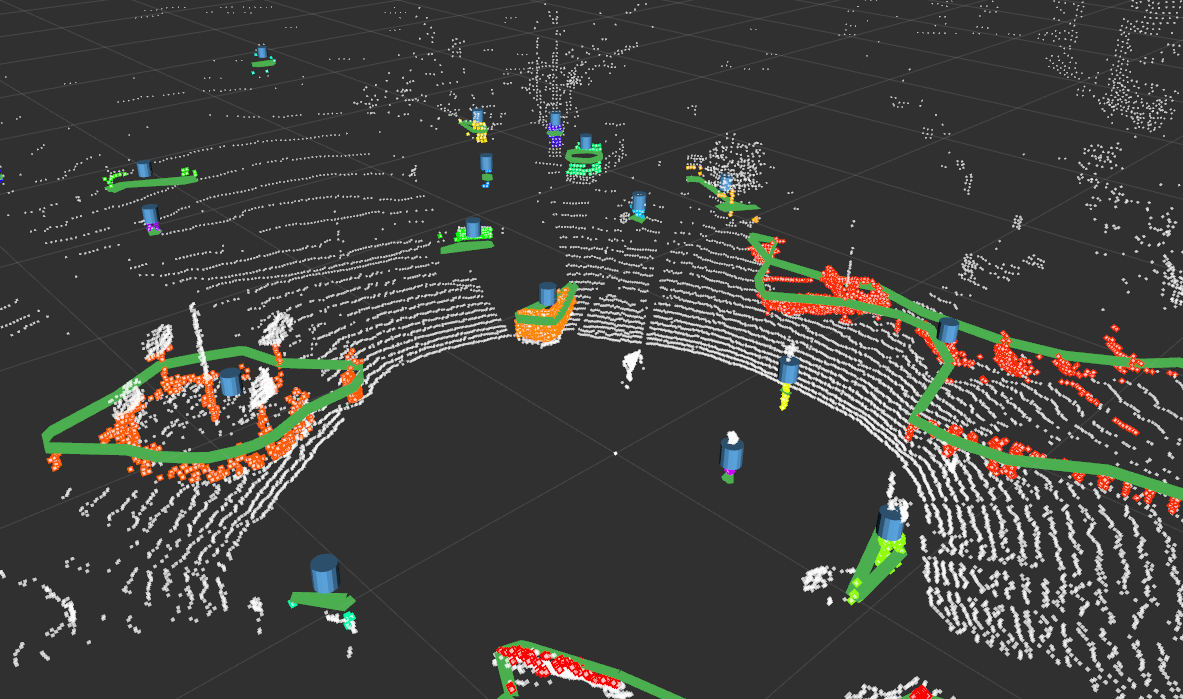
Success
If everything works as expected you should see a similar rviz window.